Investigation of human motion variance for the validation of MRK processes in the planning simulation incl. implementation of the motion variances in the planning tool ema
Grantor: Saxon Development Bank (SAB) Europe promotes Saxony (EFRE)
Funding code: 100323320
Term: 01.07.2017 - 31.12.2019
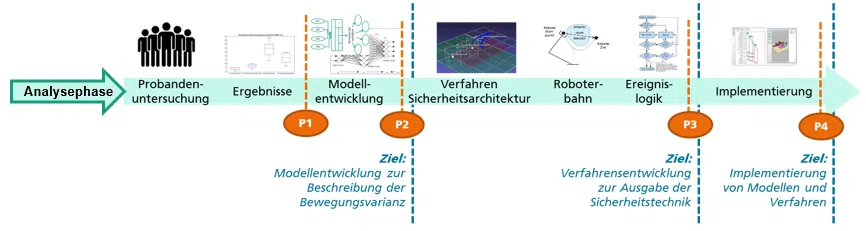
Project content
When planning and dimensioning MRC processes with ema, a lot can be represented today. For example, the motion sequence of the human, the motion path of the robot, process components and safety technology. Thus, among other things, both the ergonomics of the human, the respective cycle times and ranges can be proven and different layouts (for example, for the safety concept) can be created.
However, at the moment, the human movement executions are always the same and rigid in their predefined trajectories. Furthermore, the robot movements, the arrangement of components and the detection of the violation of the protected area must be done manually by the planner.
This means that the offline planning of the safety technology and robot path for MRK applications, taking into account the human motion variance, is missing and the dimensioning of the MRK application is largely dependent on the experience of the planner.
Target
The aim now is to ensure that the variance of human movement in manual and MRK workplaces is taken into account and to provide support for the design of the safety concept for MRK systems in the ema planning tool.
This enables offline path planning for collision avoidance based on the movement variance and plausibility checks of the process sequence with regard to the arrangement of the safety technology and the possible violation of protective or hazardous areas.
Project partner
Grantor European Union
Grantor Sächsische Aufbaubank (SAB)
Research partner
Research partner
Research partner
Research partner
Downloads & further links
Flyer study on human motion variance
Feel free to contact us!
Michael Spitzhirn
Specialist Virtual Ergonomics Methods Coordinator Research Projects & ema Education